Alan Ball and Apostolos Tsirigotis show the first results from NESTOR, the underwater neutrino detector in Greece, and describe just how well the chosen techniques are working.
In pitch-black darkness, four kilometres below the surface of the sea, a cone of blue Cerenkov light suddenly illuminates an array of photomultiplier tubes situated some 80 m above the sea floor – the signature of a relativistic muon passing through the detector. Did it come from a “common” cosmic-ray event in the Earth’s atmosphere, or was it generated by a neutrino emitted in some high-energy process in a distant galaxy that has interacted in the water near the detector or in the rock below? Neutrino astronomy is a relatively new and exciting domain that for the first time uses telescopes that do not rely on photons for primary signal transmission.

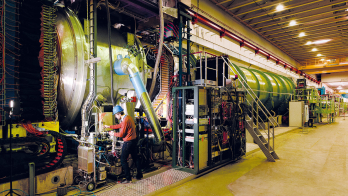
One such telescope under construction is NESTOR – the Neutrino Extended Submarine Telescope with Oceanographic Research – which will ultimately consist of a “tower” of Cerenkov detectors anchored a few nautical miles off the south-west tip of the Peloponnese in mainland Greece. Figure 1 gives an artist’s impression of part of the tower, showing several hexagonal “floors” or “stars” made of 15 m long rigid titanium arms. The arms are equipped at their extremities with upward and downward-looking 38 cm diameter photomultiplier tubes (PMTs) in glass pressure housings, which help to differentiate between upward and downward-travelling muons. The full tower, with 12 stars of 32 m diameter, will have a total height of 410 m from the sea floor and an effective area of 20,000 m2 for neutrinos with energies of 10 TeV.
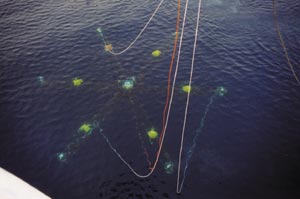
The NESTOR collaboration successfully deployed the first floor of the detector tower to a depth of 4000 m (see figure 2) at the end of March 2003. Since then, more than five million events, selected by a fast four-fold coincidence trigger, have been accumulated in an initial “physics” run. Clearly the physics or astronomy possible with a single-floor detector is limited, but it has provided invaluable experience in the operation of the detector, in data handling and in the techniques for signal processing and track reconstruction.
The techniques for deployment and payload exchange at a depth of 4000 m are well tested. Recovery of the cable termination and junction box to the surface enables the use of simpler, dry-mating connectors and avoids expensive operations with manned or autonomous submarine vehicles. To appreciate the scale of the challenge, imagine sitting at the top of Mont Blanc with a fishing line in Lake Geneva, positioning a package at the end of the line on the lake bottom to within a few metres, and then months later going back to retrieve the package in good order. These achievements were recently highlighted in the cover article in the July issue of Sea Technology, a leading marine industry journal (Anassontzis and Koske 2003).
Tracking the muons
The electrical pulses from the PMTs are digitized in a central titanium sphere on each floor and transmitted over a 30 km electro-optical cable to the shore station, where the raw data are recorded. At the heart of the system are novel ASICs, analog transient waveform digitizers (ATWDs), developed at Lawrence Berkeley National Laboratory, which can sample the PMT signals from 200 MHz to 3 GHz. From the arrival times of the signals and their intensity, the cone of Cerenkov light created by a muon has to be reconstructed to determine the direction of the muon and eventually infer the physical parameters of the incident neutrino.
In the control room the parameters of the detector are continuously monitored. These include the floor orientation (compass and tilt meters), the temperatures, humidity and hygrometry within the titanium sphere, and the external water-current velocity, temperature and pressure, as well as data from other environmental instruments mounted on the sea-bottom station (pyramid). In addition, the electrical power-distribution network and the high voltages applied to the PMTs are controlled and monitored. A run-time monitor carries out fast, on-line data processing, in parallel to the data taking, so as to check continuously the detector performance – this consists of monitoring the stability of such crucial parameters as the PMT rates, pulse height distributions, trigger timing, majority logic rates and the overall data acquisition (DAQ) performance (dead time).
A fraction of the data is fully analysed on-line to check the quality and ensure that the trigger is unbiased. Trigger rates, as a function of the signal thresholds and coincidence level settings, as well as the total photoelectron charge inside the trigger window, agree very well with Monte Carlo predictions based on Atsushi Okada’s atmospheric muon flux model (Okada 1994), the natural 40K radioactivity in the sea water and PMT dark currents. Calibration in the sea uses LED “flasher” modules mounted above and below the detector floor. These provide a rigorous, independent check of the trigger and pulse intensity of all PMTs and the full DAQ system.
In the off-line analysis, the raw data from each PMT are first passed through a signal-processing stage, which performs a base-line subtraction and corrects for attenuation. This is based on calibration parameters determined in the laboratory before deployment. As most parameters are frequency dependent, fast Fourier transforms are used. At the end of the processing stage multiple pulses are resolved and the arrival time, pulse height and total charge of each pulse (hit) is determined with precision.
In order to reconstruct tracks, events with more than five active PMTs within the trigger window are selected. The estimation of the track parameters is based on a χ2 minimization using the arrival times of the PMT pulses. In most cases the procedure converges to two or occasionally several minima, often due to an inherent geometrical degeneracy known as a “mirror solution”. To resolve this ambiguity, a second level algorithm is used that takes account of the measured number of photoelectrons at each PMT and the number expected from the candidate track, and performs a likelihood hypothesis comparison.
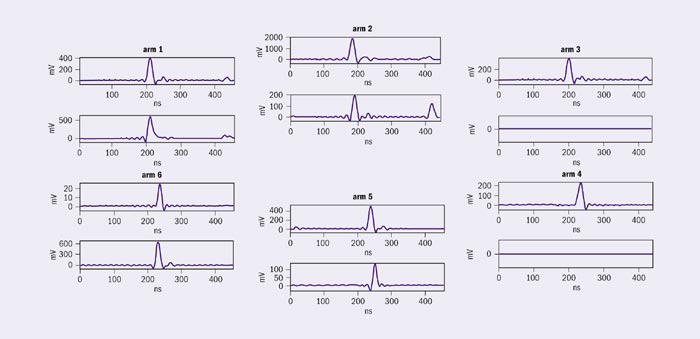
Figure 3 shows the digitized PMT waveforms, after signal processing of a selected event, whilst figure 4 shows a pictorial representation of the reconstructed track that corresponds to this event. Several tests of the track reconstruction procedures have been carried out using both data and Monte Carlo generated events. The results demonstrate that the estimation of the track parameters is unbiased.

Figure 5 shows the measured zenith angular distribution (solid points) of reconstructed events using a fraction (~30%) of the collected data. The reconstructed tracks used in this measurement have been selected by means of the minimum χ2 fit (χ2 probability > 0.1), the track quality based on the number of photoelectrons per PMT and on the total accumulated photoelectrons per hit per track (> 4.5). The histogram shows the predicted angular distribution of atmospheric muon tracks (for the NESTOR floor geometry and reconstruction efficiency) derived from Monte Carlo calculations using Okada’s phenomenological model.

Further improvements in the reconstruction efficiency are to be expected, but effective neutrino detection will require the deployment of at least four floors, which we hope to achieve in the coming year. However, we already know we have a detector that is well understood and that the data quality is excellent, supporting many of the choices made regarding, for example, the site and detector layout.
Improving signal to noise
As with any experiment, a good signal-to-noise ratio is the key to success. Cosmic-ray muons represent the principal background for a neutrino telescope and this depends on the depth of the water “shielding” – the attenuation between 1000 and 4000 m is more than two orders of magnitude. With NESTOR, further improvement is possible as the deepest point in the Mediterranean, 5200 m, is nearby. Limiting the cosmic-ray background also removes many of the uncertainties in track reconstruction, such as wrongly assigning a downward-going muon as an upward-going track. The NESTOR collaboration’s decision to have upward, as well as downward-looking phototubes seems to be well justified. At 4000 m an unambiguous upward-coming or horizontal muon track must have been generated by a neutrino.
Another source of background is bioluminescence (light emitted by micro-organisms in the water), which reduces exponentially with water depth. The signal bursts, of the order of 1 to 10 seconds duration, are easily distinguishable from those of muon tracks, but they contribute to dead time and ultimately reduce the detector efficiency. At the NESTOR site the average dead time measured at 4000 m is around 1%; values of up to 40% have been reported at other sites. A third background source, independent of depth, comes from the natural radioactive ß-decay of 40K. Together with the thermionic noise from the PMTs, this represents a low-intensity uncorrelated baseline signal level of 50 kHz, which is easily subtracted by the tracking algorithm.
The use of a rigid structure to mount groups of PMTs removes uncertainties in their relative positions and aids reconstruction at the “floor level”. This approach seems preferable to having individual or small clusters of phototubes on independent strings. The orientation of the whole star is monitored so that only relative horizontal displacements between complete stars require external telemetry using acoustic or optical references. Experience of track reconstruction with several floors is needed to demonstrate that these advantages compensate for the additional constraints in deployment operations.
The choice of the NESTOR site for its depth, water clarity, low sedimentation and very low underwater currents is already paying dividends. The proximity to shore is an important safety consideration in case of bad weather at sea and facilitates the staging of deployment and recovery operations. Crews can be exchanged during lengthy procedures, and additional equipment or specialist help can be brought in when required. The NESTOR site is only 7.5 nautical miles from land and 11 nautical miles from the shore station in Methoni – 20 minutes by fast launch.
Deploying this first stage of the detector in 4000 m of water and making it work has required an enormous effort from the small team most directly involved and has only been possible due to the unfailing support of many authorities, organizations, companies and individuals too numerous to mention.
The European astroparticle physics community’s aim is to build a very large volume neutrino telescope (km cube) in the northern hemisphere. It is to be hoped that this “feasibility demonstration” will encourage better co-ordination between the various groups working in the field and will help to attract the necessary funding and manpower for this large project. Such a detector would complement the already approved ICECUBE project at the South Pole.
Further reading
For further information about NESTOR, see www.nestor.org.gr.
E G Anassontzis and P Koske 2003 Sea Technology 44 10.
A Okada 1994 Astroparticle Physics 2 393.